Google Brain researchers published this amazing paper, with accompanying GIF where they show the true power of AutoML.
AutoML stands for automated machine learning, and basically refers to an algorithm autonomously building the best machine learning model for a given problem.
This task of selecting the best ML model is difficult as it is. There are many different ML algorithms to choose from, and each of these has many different settings ([hyper]parameters) you can change to optimalize the model’s predictions.
For instance, let’s look at one specific ML algorithm: the neural network. Not only can we try out millions of different neural network architectures (ways in which the nodes and lyers of a network are connected), but each of these we can test with different loss functions, learning rates, dropout rates, et cetera. And this is only one algorithm!
In their new paper, the Google Brain scholars display how they managed to automatically discover complete machine learning algorithms just using basic mathematical operations as building blocks. Using evolutionary principles, they have developed an AutoML framework that tailors its own algorithms and architectures to best fit the data and problem at hand.
This is AI research at its finest, and the results are truly remarkable!
Sometimes I find these AI / programming hobby projects that I just wished I had thought of…
Will Stedden combined OpenAI’s GPT-2 deep learning text generation model with another deep-learning language model by Google called BERT (Bidirectional Encoder Representations from Transformers) and created an elaborate architecture that had one purpose: posting the best replies on Reddit.
The architecture is shown at the end of this post — copied from Will’s original bloghere. Moreover, you can read this post for details regarding the construction of the system. But let me see whether I can explain you what it does in simple language.
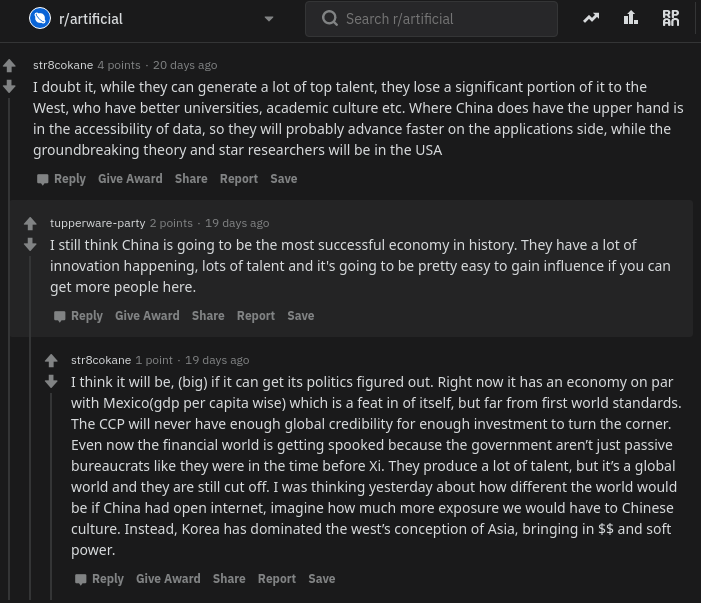
The below is what a Reddit comment and reply thread looks like. We have str8cokane making a comment to an original post (not in the picture), and then tupperware-party making a reply to that comment, followed by another reply by str8cokane. Basically, Will wanted to create an AI/bot that could write replies like tupperware-party that real people like str8cokane would not be able to distinguish from “real-people” replies.
Note that with 4 points, str8cokane‘s original comments was “liked” more than tupperware-party‘s reply and str8cokane‘s next reply, which were only upvoted 2 and 1 times respectively.
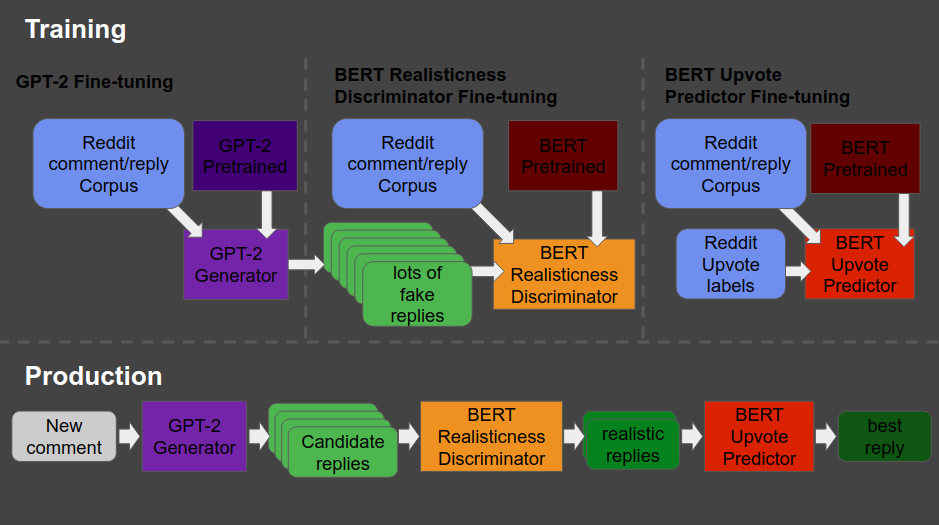
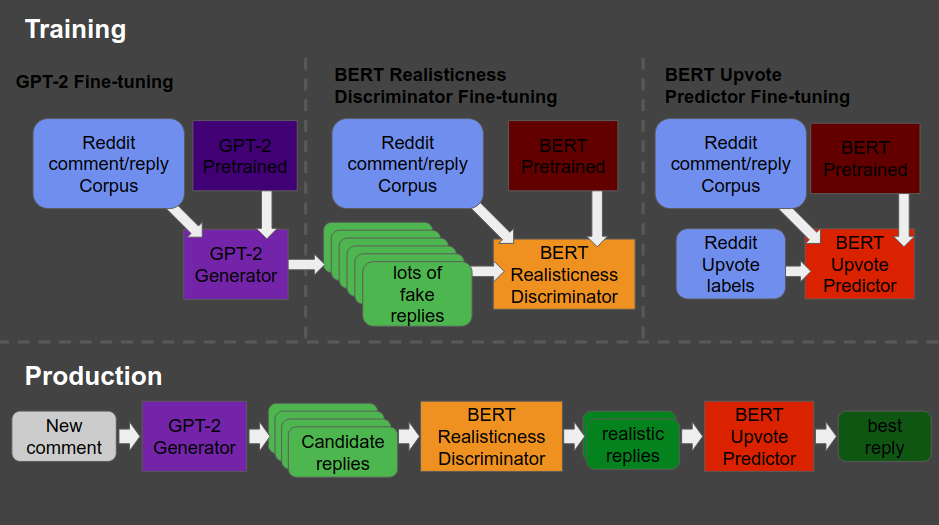
So here’s what the final architecture looks like, and my attempt to explain it to you.
Basically, we start in the upper left corner, where Will uses a database (i.e. corpus) of Reddit comments and replies to fine-tune a standard, pretrained GPT-2 model to get it to be good at generating (red: “fake”) realistic Reddit replies.
Next, in the upper middle section, these fake replies are piped into a standard, pretrained BERT model, along with the original, real Reddit comments and replies. This way the BERT model sees both real and fake comments and replies. Now, our goal is to make replies that are undistinguishable from real replies. Hence, this is the task the BERT model gets. And we keep fine-tuning the original GPT-2 generator until the BERT discriminator that follows is no longer able to distinguish fake from real replies. Then the generator is “fooling” the discriminator, and we know we are generating fake replies that look like real ones! You can find more information about such generative adversarial networks here.
Next, in the top right corner, we fine-tune another BERT model. This time we give it the original Reddit comments and replies along with the amount of times they were upvoted (i.e. sort of like likes on facebook/twitter). Basically, we train a BERT model to predict for a given reply, how much likes it is going to get.
Finally, we can go to production in the lower lane. We give a real-life comment to the GPT-2 generator we trained in the upper left corner, which produces several fake replies for us. These candidates we run through the BERT discriminator we trained in the upper middle section, which determined which of the fake replies we generated look most real. Those fake but realistic replies are then input into our trained BERT model of the top right corner, which predicts for every fake but realistic reply the amount of likes/upvotes it is going to get. Finally, we pick and reply with the fake but realistic reply that is predicted to get the most upvotes!
What Will’s final architecture, combining GPT-2 and BERT, looked like (via bonkerfield.org)
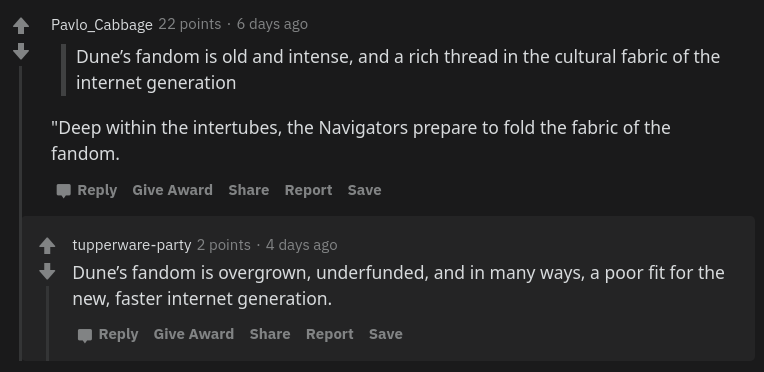
The results are astonishing! Will’s bot sounds like a real youngster internet troll! Do have a look at the original blog, but here are some examples. Note that tupperware-party — the Reddit user from the above example — is actually Will’s AI.
Will ends his blog with a link to the tutorial if you want to build such a bot yourself. Have a try!
Moreover, he also notes the ethical concerns:
I know there are definitely some ethical considerations when creating something like this. The reason I’m presenting it is because I actually think it is better for more people to know about and be able to grapple with this kind of technology. If just a few people know about the capacity of these machines, then it is more likely that those small groups of people can abuse their advantage.
I also think that this technology is going to change the way we think about what’s important about being human. After all, if a computer can effectively automate the paper-pushing jobs we’ve constructed and all the bullshit we create on the internet to distract us, then maybe it’ll be time for us to move on to something more meaningful.
If you think what I’ve done is a problem feel free to email me , or publically shame me on Twitter.
Xander Steenbrugge shared his latest work on LinkedIn yesterday, and I was completely stunned!
Xander had been working on, what he called, a “fun side-project”, but which was in my eyes, absolutely awesome. He had used two generative adversarial networks (GANs) to teach one another how to respond visually to changing audio cues.
This resulted in the generation of stunning audio-visual fanatasy worlds that are complete brain porn. You just can’t stop staring. So much is happening in these video’s; everything looks familiar, whereas nothing really represent anything realistic. There’s always a sliver of reality before the visual shapes morph to their next form.
Have a look yourself at the video’s on Xander’s new Youtube channel “Neural Synesthesia“ dedicated to this project. The videos are also hosted here on Vimeo, where they are rendered in higher resolution even.
This is my favorite video, but there are more below.
Amazing how the image responds to changes in the music, right? I suspect Xander let’s the algorithm traverse some latent space with spaces that are determined by the bass, trebble, and other audio-cues.
Here’s another one of Xander’s videos, with the same audio track as background:
But Xander didn’t limit his GANs to generating landscapes and still paintings, but he also dared to do some human faces. These also turned out amazing.
Both the left and right face seem to start out in about the same position/seed in the latent space, but traverse in different, though still similar directions, morphing into all kinds of reaslistic and more alien forms. The result is simply out of this world!
Curious to see where this project and others head as we continue to see development in this GAN field. This must turn the world of design and art up side down in the coming decade…
A beautiful machine-generated still from the Neural Synthesia videos (link)
I’ve seen some uses of reinforcement learning and generative algorithms for architectural purposes already, like these evolving blueprints for school floorplans. However, this new application called ArchiGAN blew me away!
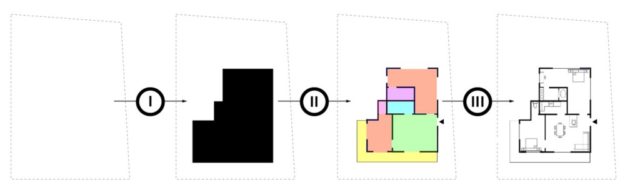
ArchiGAN (try here) was made by Stanislas Chaillou as a Harvard master’s thesis project. The program functions in three steps:
building footprint massing
program repartition
furniture layout
Stanislas’ three generation steps
Each of these three steps uses a TensorFlow Pix2Pix GAN-model (Christopher Hesse’s implementation) in the back-end, and their combination makes for a entire apartment building “generation stack” — according to Stanislas — which also allows for user input at each step.
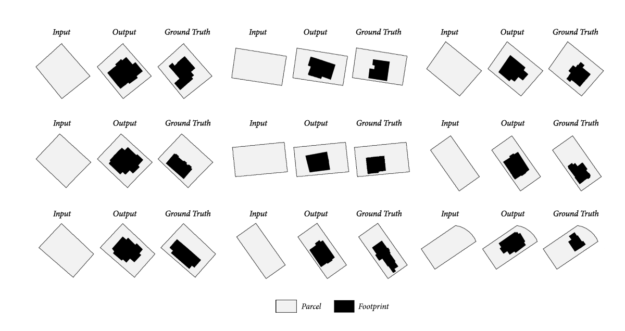
The design of a building can be inferred from the piece of land it stands on. Hence, Stanislas fed his first model using GIS-data (Geographic Information System) from the city of Boston in order to generate typical footprints based on parcel shapes.
The inputs and outputs of model I
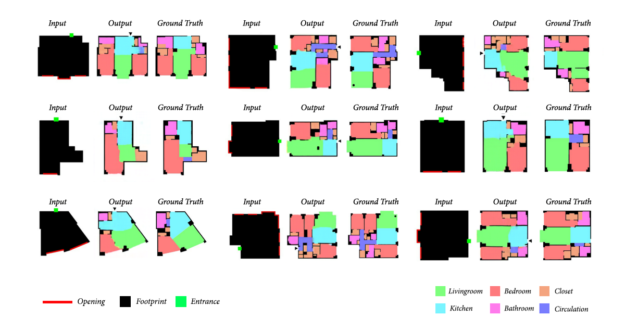
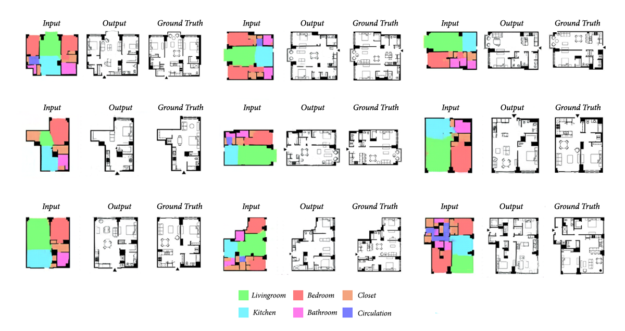
Stanislas’ second model was responsible for repartition and fenestration (the placement of windows and doors). This GAN took the footprint of the building (the output of model I) as input, along with the position of the entrance door (green square), and the positions of the user-specified windows.
Stanislas used a database of 800+ plans of apartments for training. To visualize the output, rooms are color-coded and walls and fenestration are blackened.
The inputs and outputs of model II
Finally, in the third model, the rooms are filled with appropriate furniture. What training data Stanislas has used here, he did not specify in the original blog.
The inputs and outputs of model III
Now, to put all things together, Stanislas created a great interactive tool you can play with yourself. The original NVIDEA blog contains some great GIFs of the tool being used:
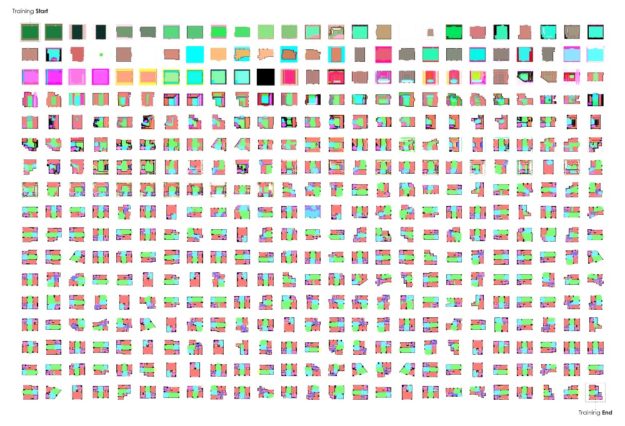
Stanislas’ GAN-models progressively learned to design rooms and realistically position doors and windows. It took about 250 iterations to get some realistic floorplans out of the algorithm. Here’s how an example learning sequence looked like:
Visualization of the training process
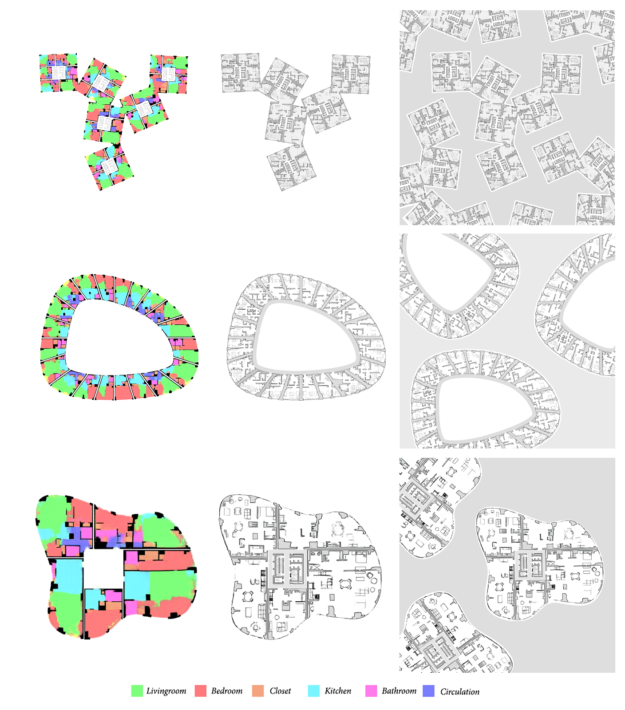
Now, Stanislas was not done yet. He also scaled the utilization of GANs to design whole apartment buildings. Here, he chains the models and processes multiple units as single images at each step.
Generating whole appartment blocks using ArchiGAN
Stanislas did other cool things to improve the flexibility of his ArchiGAN models, about which you can read more in the original blog. Let these visuals entice you to read more:
ArchiGAN scaled to handle whole appartment blocks and neighborhoods.
I believe a statistical approach to design conception will shape AI’s potential for Architecture. This approach is less deterministic and more holistic in character. Rather than using machines to optimize a set of variables, relying on them to extract significant qualities and mimicking them all along the design process represents a paradigm shift.
I am so psyched about these innovative applications of machine learning, so please help me give Stanislas the attention and credit he deserved.
Currently, Stanislas is Data Scientist & Architect at Spacemaker.ai. Read more about him in his NVIDEA developer bio here. He recently published a sequence of articles, laying down the premise of AI’s intersection with Architecture. Read here about the historical background behind this significant evolution, to be followed by AI’s potential for floor plan design, and for architectural style analysis & generation.
Past days, I discovered this series of blogs on how to win the classic game of Battleships (gameplay explanation) using different algorithmic approaches. I thought they might amuse you as well : )
The story starts with this 2012 Datagenetics blog where Nick Berry constrasts four algorithms’ performance in the game of Battleships. The resulting levels of artificial intelligence (AI) seem to compare respectively to a distracted baby, two sensible adults, and a mathematical progidy.
The first, stupidest approach is to just take Random shots. The AI resulting from such an algorithm would just pick a random tile to shoot at each turn. Nick simulated 100 million games with this random apporach and computed that the algorithm would require 96 turns to win 50% of games, given that it would not be defeated before that time. At best, the expertise level of this AI would be comparable to that of a distracted baby. Basically, it would lose from the average toddler, given that the toddler would survive the boredom of playing such a stupid AI.
A first major improvement results in what is dubbed the Hunt algorithm. This improved algorithm includes an instruction to explore nearby spaces whenever a prior shot hit. Every human who has every played Battleships will do this intuitively. A great improvement indeed as Nick’s simulations demonstrated that this Hunt algorithm completes 50% of games within ~65 turns, as long as it is not defeated beforehand. Your little toddler nephew will certainly lose, and you might experience some difficulty as well from time to time.
A visual representation of the “Hunting” of the algorithm on a hit [via]
Another minor improvement comes from adding the so-called Parity principle to this Hunt algorithm (i.e., Nick’s Hunt + Parity algorithm). This principle instructs the algorithm to take into account that ships will always cover odd as well as even numbered tiles on the board. This information can be taken into account to provide for some more sensible shooting options. For instance, in the below visual, you should avoid shooting the upper left white tile when you have already shot its blue neighbors. You might have intuitively applied this tactic yourself in the past, shooting tiles in a “checkboard” formation. With the parity principle incorporated, the median completion rate of our algorithm improves to ~62 turns, Nick’s simulations showed.
Now, Nick’s final proposed algorithm is much more computationally intensive. It makes use of Probability Density Functions. At the start of every turn, it works out all possible locations that every remaining ship could fit in. As you can imagine, many different combinations are possible with five ships. These different combinations are all added up, and every tile on the board is thus assigned a probability that it includes a ship part, based on the tiles that are already uncovered.
Computing the probability that a tile contains a ship based on all possible board layouts [via]
At the start of the game, no tiles are uncovered, so all spaces will have about the same likelihood to contain a ship. However, as more and more shots are fired, some locations become less likely, some become impossible, and some become near certain to contain a ship. For instance, the below visual reflects seven misses by the X’s and the darker tiles which thus have a relatively high probability of containing a ship part.
An example distribution with seven misses on the grid. [via]
Nick simulated 100 million games of Battleship for this probabilistic apporach as well as the prior algorithms. The below graph summarizes the results, and highlight that this new probabilistic algorithm greatly outperforms the simpler approaches. It completes 50% of games within ~42 turns! This algorithm will have you crying at the boardgame table.
Relative performance of the algorithms in the Datagenetics blog, where “New Algorithm” refers to the probabilistic approach and “No Parity” refers to the original “Hunt” approach.
Reddit user /u/DataSnaek reworked this probablistic algorithm in Python and turned its inner calculations into a neat GIF. Below, on the left, you see the probability of each square containing a ship part. The brighter the color (white <- yellow <- red <- black), the more likely a ship resides at that location. It takes into account that ships occupy multiple consecutive spots. On the right, every turn the algorithm shoots the space with the highest probability. Blue is unknown, misses are in red, sunk ships in brownish, hit “unsunk” ships in light blue (sorry, I am terribly color blind).
The probability matrix as a heatmap for every square after each move in the game. [via]
This latter attempt by DataSnaek was inspired by Jonathan Landy‘s attempt to train a reinforcement learning (RL) algorithm to win at Battleships. Although the associated GitHub repository doesn’t go into much detail, the approach is elaborately explained in this blog. However, it seems that this specific code concerns the training of a neural network to perform well on a very small Battleships board, seemingly containing only a single ship of size 3 on a board with only a single row of 10 tiles.
Fortunately, Sue He wrote about her reinforcement learning approach to Battleships in 2017. Building on the open source phoenix-battleship project, she created a Battleship app on Heroku, and asked co-workers to play. This produced data on 83 real, two-person games, showing, for instance, that Sue’s coworkers often tried to hide their size 2 ships in the corners of the Battleships board.
Probability heatmaps of ship placement in Sue He’s reinforcement learning Battleships project [via]
Next, Sue scripted a reinforcement learning agent in PyTorch to train and learn where to shoot effectively on the 10 by 10 board. It became effective quite quickly, requiring only 52 turns (on average over the past 25 games) to win, after training for only a couple hundreds games.
The performance of the RL agent at Battleships during the training process [via]
However, as Sue herself notes in her blog, disappointly, this RL agent still does not outperform the probabilistic approach presented earlier in this current blog.
Reddit user /u/christawful faced similar issues. Christ (I presume he is called) trained a convolutional neural network (CNN) with the below architecture on a dataset of Battleships boards. Based on the current board state (10 tiles * 10 tiles * 3 options [miss/hit/unknown]) as input data, the intermediate convolutional layers result in a final output layer containing 100 values (10 * 10) depicting the probabilities for each tile to result in a hit. Again, the algorithm can simply shoot the tile with the highest probability.
Christ’s convolutional neural network architecture for Battleships [via]
Christ was nice enough to include GIFs of the process as well [via]. The first GIF shows the current state of the board as it is input in the CNN — purple represents unknown tiles, black a hit, and white a miss (i.e., sea). The next GIF represent the calculated probabilities for each tile to contain a ship part — the darker the color the more likely it contains a ship. Finally, the third picture reflects the actual board, with ship pieces in black and sea (i.e., miss) as white.
As cool as this novel approach was, Chris ran into the same issue as Sue, his approach did not perform better than the purely probablistic one. The below graph demonstrates that while Christ’s CNN (“My Algorithm”) performed quite well — finishing a simulated 9000 games in a median of 52 turns — it did not outperform the original probabilistic approach of Nick Berry — which came in at 42 turns. Nevertheless, Chris claims to have programmed this CNN in a couple of hours, so very well done still.
The performance of Christ’s Battleship CNN compared to Nick Berry’s original algorithms [via]
Interested by all the above, I searched the web quite a while for any potential improvement or other algorithmic approaches. Unfortunately, in vain, as I did not find a better attempt than that early 2012 Datagenics probability algorithm by Nick.
Surely, with today’s mass cloud computing power, someone must be able to train a deep reinforcement learner to become the Battleship master? It’s not all probability right, there must be some patterns in generic playing styles, like Sue found among her colleagues. Or maybe even the ability of an algorithm to adapt to the opponent’s playin style, as we see in Libratus, the poker AI. Maybe the guys at AlphaGo could give it a shot?
For starters, Christ’s provided some interesting improvements on his CNN approach. Moreover, while the probabilistic approach seems the best performing, it might not the most computationally efficient. All in all, I am curious to see whether this story will continue.
In optimizing their transportation services, Uber uses evolutionary strategies and genetic algorithms to train deep neural networks through reinforcement learning. A lot of difficult words in one sentence; you can imagine the complexity of the process.
Because it is particularly difficult to observe the underlying dynamics of this learning process in neural network optimization, Uber built VINE – a Visual Inspector for NeuroEvolution. VINE helps to discover how evolutionary strategies and genetic optimizing are performing under the hood. In a recent article, they demonstrate how VINE works on the MujocoHumanoid Locomotion task.
[…] In the Humanoid Locomotion Task, each pseudo-offspring neural network controls the movement of a robot, and earns a score, called its fitness, based on how well it walks. [Evolutionary principles] construct the next parent by aggregating the parameters of pseudo-offspring based on these fitness scores […]. The cycle then repeats.
VINE plots parent neural networks and their pseudo-offspring according to their performance. Users can then interact with these plots to:
visualize parents, top performance, and/or the entire pseudo-offspring cloud of any generation,
compare between and within generation performance,
and zoom in on any pseudo-offspring (points) in the plot to display performance information.
The GIFs below demonstrate what VINE is capable of displaying:
The evolution of performance over generations. The color changes in each generation. Within a generation, the color intensity of each pseudo-offspring is based on the percentile of its fitness score in that generation (aggregated into five bins). [original]Vine allows user to deep dive into each single generation, comparing generations and each pseudo-offspring within them [original]VINE can be found at this link. It is lightweight, portable, and implemented in Python.